Stretchable skin-like robots that can be rolled up and put in your pocket have been developed by a University of Bristol team using a new way of embedding artificial muscles and electrical adhesion into soft materials.
This new advance, published in Soft Robotics, could create new thin and light robots for environmental monitoring and deployment in hazardous environments, robot grippers for delicate objects and new wearable technologies.
Traditional robots are rigid and incompliant, whereas soft robots are compliant and can stretch and twist to adapt to their environments. Until now, soft robots have separated their movement abilities from their capabilities to grip the surface they move on. Taking inspiration from biological skins and soft organisms like snails and slugs, researchers from Bristol’s Faculty of Engineering, led by Professor of Robotics Jonathan Rossiter, have successfully demonstrated a new robotic skin that crawls across a surface by alternately contracting embedded artificial muscles and gripping the surface using electrical charges.
In the paper, the team describe how a robot made from the skin, called ElectroSkin, can be scrunched up, put in one’s pocket and then later pulled out and thrown on a surface where it moves. ElectroSkin is a new fundamental building block for a range of soft next generation robots.
In the future, ElectroSkin robots could crawl up walls and across ceiling to clean them, explore difficult to reach environments including collapsed buildings, and be used in a range wearable second-skin devices.
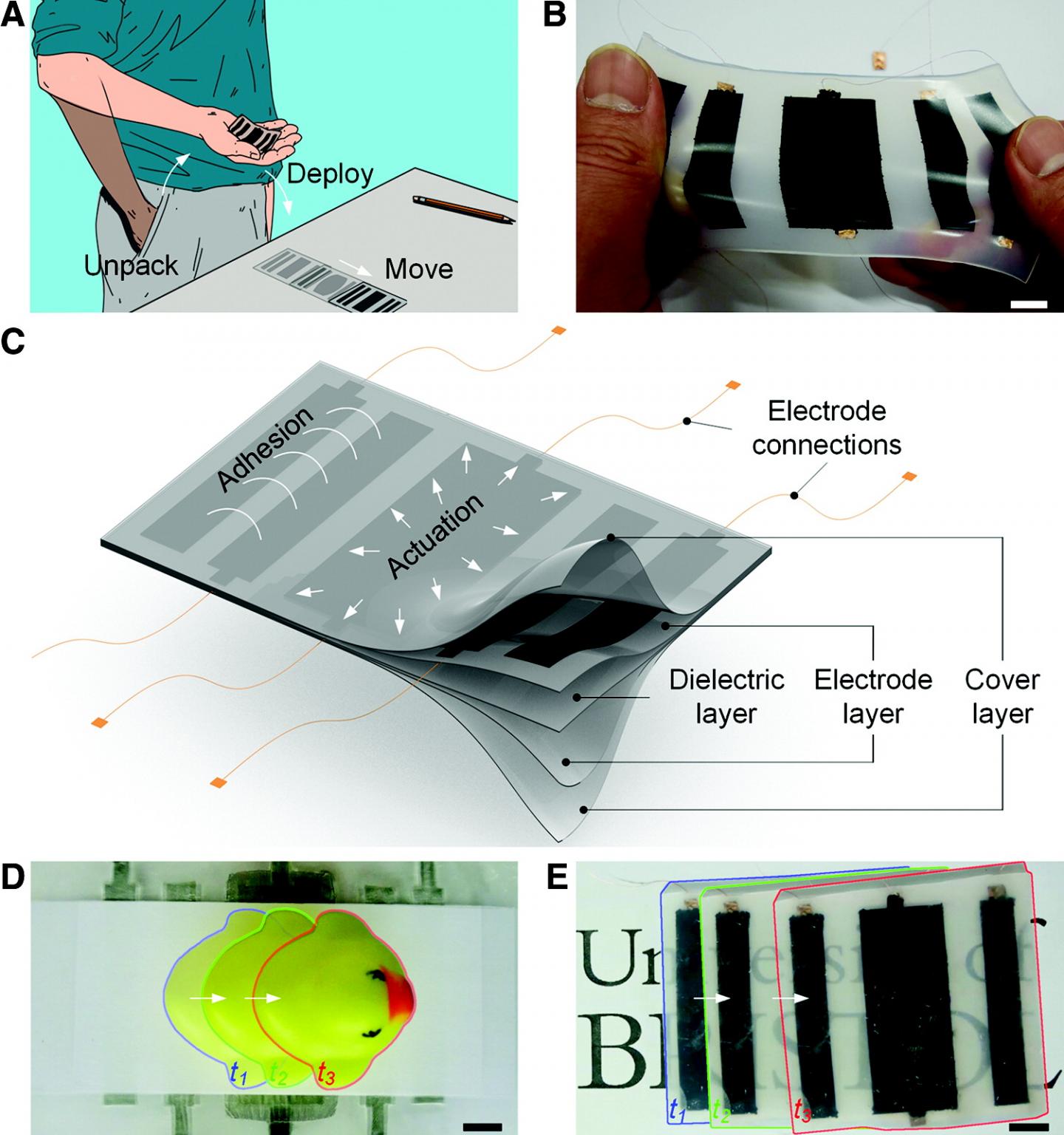
Active soft-smart structures with self-actuating, self-gripping, and self-locomoting capabilities. (A) Pocketable and deployable fully soft crawling robot concept. (B) A fully soft ElectroSkin robot stretching in hand. (C) Schematic diagram of the fundamental ElectroSkin design showing regions powered for electroadhesion and actuation. (D) An ElectroSkin conveyor moving a yellow duck on a piece of office paper. (E) A fully soft ElectroSkin robot self-locomoting across a surface. Scale bars denote 1?cm.
CREDIT
Professor Jonathan Rossiter
Professor Rossiter said: “ElectroSkin is an important step toward soft robots that can be easily transported, deployed and even worn. The combination of electrical artificial muscles and electrical gripping replicated the movements of animals like slugs and snails, and where they can go, so could our robots!”
###
Paper: All-Soft Skin-Like Structures for Robotic Locomotion and Transportation, Jianglong Guo, Chaoqun Xiang, Andrew Conn, and Jonathan Rossiter, in Soft Robotics https:/
Source: UNIVERSITY OF BRISTOL