Etichetă: electronic skin
Un muschi ultrafin, artificial pentru robotica haptica
Cercetătorii de la KAIST au dezvoltat un mușchi ultrafin, artificial pentru robotica soft (haptic). Progresul, recent raportat în revista Science Robotics, a fost demonstrat cu o broșă de înfloritoare robotizată, dansând fluturi robotici și frunzele de copac falfaind pe o piesă de artă cinetică. Echivalentul robot al unui mușchi care se poate mișca este denumit Citește mai mult despreUn muschi ultrafin, artificial pentru robotica haptica[…]

O noua formula pentru a recrea diferite senzatii soft pentru interfetele haptice
Ce factori afectează felul în care atingerea umană percepe soft, precum senzația de a-ți apăsa vârful degetului pe o bezea, o bucată de lut sau o minge de cauciuc? Cercetând în detaliu această întrebare, o echipă de ingineri și psihologi de la Universitatea din California San Diego a descoperit trucuri inteligente pentru a proiecta materiale Citește mai mult despreO noua formula pentru a recrea diferite senzatii soft pentru interfetele haptice[…]
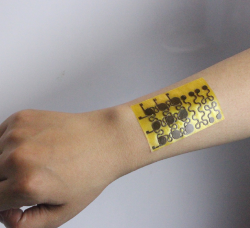

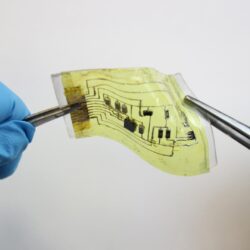
(English) BioStamp® technology platform to deliver wearable sensors that flex, bend and stretch to match the properties of the human body
Din păcate acest articol este disponibil doar în Engleză Americană. For the sake of viewer convenience, the content is shown below in the alternative language. You may click the link to switch the active language. MC10, Inc. unveiled the BioStamp Research Connect System (BioStampRC™), providing researchers with an end to end solution for seamlessly gathering physiological Citește mai mult despre(English) BioStamp® technology platform to deliver wearable sensors that flex, bend and stretch to match the properties of the human body[…]