Dispozitivul X-Arm-2 Exoskeleton este unul ergonomic acționat complet haptic pentru forța de reflecție la brațul drept operatorilor săi. Exoscheletul haptic are 14 articulatii, care sunt echipate cu senzori de poziție comuna. Din cele 14 articulațiilor, 8 sunt echipate suplimentar si ajustati cu senzori de cuplu de înaltă rezoluție, unități de motor de transmisie și senzori de poziție intrare-/ ieșire.
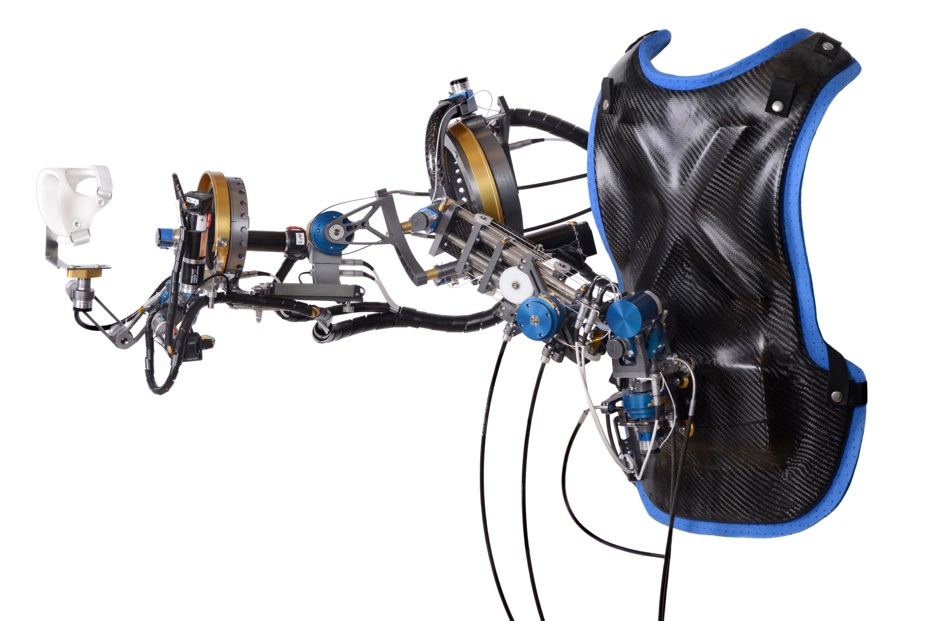
Elementele de acționare sunt dotate cu combinații inovatoare de motoare de curent continuu cu perii, cu angrenaje planetare si reductoare cabestan și pentru unele articulații inlcude sisteme „Bowden Cable”. Toate actuatoarele „drive-trains”, inclusiv cele cu cabluri Bowden au fost proiectate și personalizate pentru a permite o mai mare transparență forță-reflecție.
Toate îmbinările exoscheletului oferă o gamă dinamică mare și pentru a permite o forta de feedback printr-o rată de control cuplu comun 5 kHz și zgomot redus de senzor. X-Arm-2 este folosit pentru cercetare pe sub-acționat dispozitive haptice și este parte a unei celule de control bilateral de lucru format din exoschelet, fiind un operator cu 7 grade de libertate KUKA ,manipulator ușor (LWR).
Sursa: ESA TRH Laboratory