Finding the ideal position for interventional needles – as used in biopsies, for instance – is a difficult and time-consuming process. This can now be performed automatically, using a robotic arm to place a needle guide for the doctor at the optimal insertion point. With robotic assistance, doctors need five minutes to position the needle, as opposed to 30 minutes with conventional techniques. The solution will be shown at the MEDICA trade fair in Düsseldorf from November 14 to 17, 2016 (Hall 10, Booth G05).
 An ultrasound shows a shadow on the liver – but is it a tumor? Often, the only way to conclusively answer this question is to perform a biopsy, a procedure in which a doctor uses a long needle to remove a piece of the suspected tissue to be sent to a laboratory for testing. However, placing the biopsy needle with precision is far from easy. On one hand, the doctor needs to be sure of reaching the suspected tissue – and not healthy tissue just millimeters to the side. On the other hand, the needle must not damage veins, nerve pathways, and organs such as the lungs, and cannot penetrate bony structures such as ribs. To obtain an overview, doctors begin by performing a com- puted tomography scan, which they use to maneuver the needle to the correct posi- tion. The same challenges arise in treatments that use needles to direct heating, cooling, or high-energy beams into the cancerous tissue, thereby destroying the tumor.
An ultrasound shows a shadow on the liver – but is it a tumor? Often, the only way to conclusively answer this question is to perform a biopsy, a procedure in which a doctor uses a long needle to remove a piece of the suspected tissue to be sent to a laboratory for testing. However, placing the biopsy needle with precision is far from easy. On one hand, the doctor needs to be sure of reaching the suspected tissue – and not healthy tissue just millimeters to the side. On the other hand, the needle must not damage veins, nerve pathways, and organs such as the lungs, and cannot penetrate bony structures such as ribs. To obtain an overview, doctors begin by performing a com- puted tomography scan, which they use to maneuver the needle to the correct posi- tion. The same challenges arise in treatments that use needles to direct heating, cooling, or high-energy beams into the cancerous tissue, thereby destroying the tumor.
Combining robot precision and doctors’ expertise
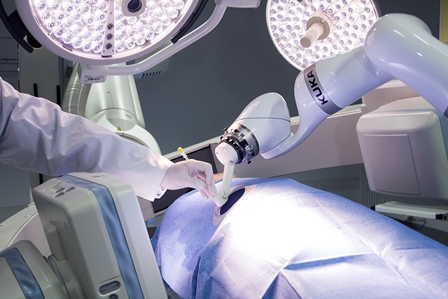
Soon, precisely positioning needles will become faster thanks to a robotic arm that researchers from the Fraunhofer Institute for Manufacturing Engineering and Automa-tion IPA’s Project group for Automation in Medicine and Biotechnology PAMB and the Fraunhofer Institute for Medical Image Computing MEVIS have modified specifically for this purpose. “Whereas humans struggle to position this sort of needle, it’s hard to beat a robot designed for the purpose,” says Andreas Rothfuss, a researcher at the PAMB. “Our system removes burdens for doctors while leaving them in control.” In other words, the robot does what it does best – locating the right path and positioning the needle guide so that there is no risk of hitting or injuring either doctor or patient. Thereafter, the doctor again takes command and inserts the needle into the tissue. “A human needs 30 minutes to position the needle, but with robot assistance this is cut down to five minutes at most,” says Rothfuss.
To begin the procedure, the doctor begins by performing a computed tomography scan of the patient. This time, however, the robot arm accompanies the scan using a calibration tool to determine the ideal position to target a specific point in the image. Software from Fraunhofer MEVIS analyzes the image and supports the doctor in placing the virtual needle by displaying the needle in the image. If, instead of a biopsy, the doctor is administering treatment – seeking to destroy a tumor by applying heat, for instance – the software simulates how the heat will spread through the tissue. The last step is to determine the number of needles and their positions required to kill off the entire tumor. Thereafter, the robot arm’s calibration tool is replaced with a needle guide. The robot transports the guide to the calculated position and places it on the skin at the correct angle. However, it does not insert the needle itself: this is left to the doctor, who pushes the needle into the tissue step by step through the needle guide held in place by the robot.
Less radiation exposure for doctor and patient
To ensure that the needle is in the planned position, doctors take X-rays as part of the standard procedure as they insert the needle into the tissue. Here, too, the robot offers several advantages. In conventional needle insertion, doctors hold the needle in place manually, obscuring a part of the X-ray. This also exposes doctors’ hands to radiation each time a monitoring image is taken. Now, the robot, impervious to radiation, can hold the needle in place with its needle guide. There is also a signifi-cant reduction in the patient’s radiation exposure – the doctor inserts the needle through the guide, eliminating needle slippage. As a result, the number of monitoring X-rays is greatly reduced.
The researchers will showcase their development at the MEDICA trade fair in Düsseldorf from November 14 to 17 (Hall 10, Booth G05). The robot arm will be positioning its needle guide over a transparent plastic box complete with artificial ribs and a tumor embedded in a transparent polymer. This will allow visitors to see exactly where the needle is. Researchers hope that the system could reach the market in around three years.
Source: Fraunhofer Institute